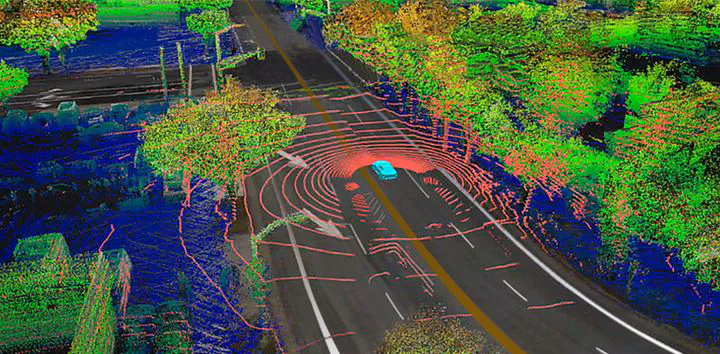
Autonomous Mapping and Navigation of Intelligent Vehicles
Sep 1, 2023
·
1 min read
Project Duration: Sep. 2020 to Sep. 2023
Project Partners: Ecovacs University-Enterprise Joint Project
Project Details
- Utilizing convolutional neural networks for pedestrian detection and tracking in videos
- Predicting pedestrian trajectories to enable real-time obstacle avoidance for a small car
- Under the YOLOv4 environment, it allows for quick mapping
- Autonomous path planning under the ROS (Robot Operating System) framework
Achievements
Gather complex environmental information, complete autonomous mapping, plan the best path with the A* algorithm, and the system will also use OpenCV to preliminarily recognize pedestrian postures.