Research projects focusing on robotics, autonomous systems, and machine learning applications.
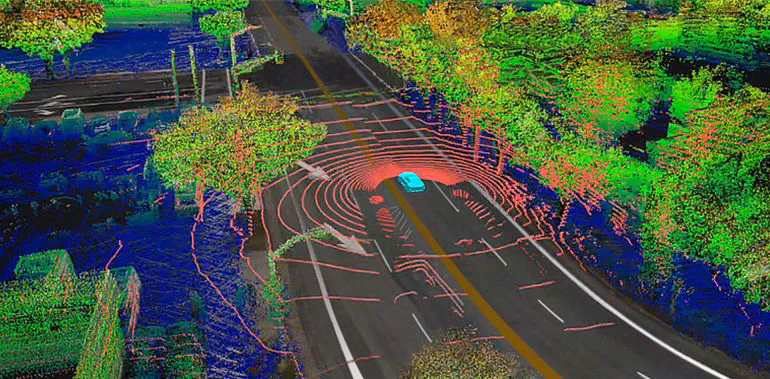
Project Duration: Sep. 2020 to Sep. 2023 Project Partners: Ecovacs University-Enterprise Joint Project Project Details Utilizing convolutional neural networks for pedestrian detection and tracking in videos Predicting pedestrian trajectories to enable real-time obstacle avoidance for a small car Under the YOLOv4 environment, it allows for quick mapping Autonomous path planning under the ROS (Robot Operating System) framework Achievements Gather complex environmental information, complete autonomous mapping, plan the best path with the A* algorithm, and the system will also use OpenCV to preliminarily recognize pedestrian postures.
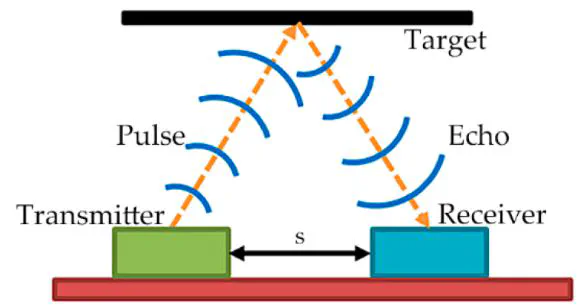
Project Duration: May. 2023 to Aug. 2023 Project Details Implement URDF-based sensor emulation in Gazebo to match real-world sensor physics Fine-tune Gazebo object properties for high reflectivity and transparency to evaluate sensor performance Streamline ROS data collection from ultrasonic sensors, construct Gaussian models, and estimate parameters via Maximum Likelihood Estimation Calculate the accuracy, recall, and F1 score of recognition, and optimize model parameters Achievements Achieved precise acquisition of ultrasonic sensor data and improved the recognition accuracy of highly reflective and highly transparent objects through the Gaussian model.
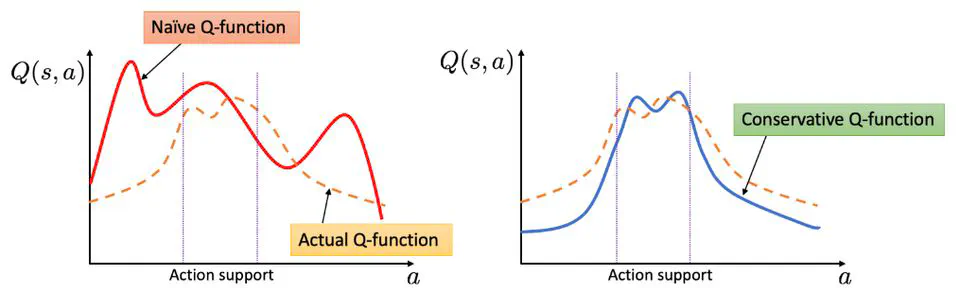
Project Duration: Sep. 2022 to Feb. 2023 Project Details Within the ROS environment based on the Noetic version, an offline reinforcement learning algorithm CQL (Conservative Q-Learning) is utilized, introducing conservative constraints into the Q-value updates Various domestic simulation environments are constructed in Gazebo, and path trajectories are generated using the A* algorithm to collect trajectory data The Rviz tool is employed to view and analyze the robot’s trajectory, with manual annotation of the optimal path The annotated data serves as a supervisory signal to train the model, with the parameters being saved Achievements A simulation path training set for the vacuum cleaner in Gazebo has been obtained. The conservative coefficient α has been adjusted to optimize the CQL (Conservative Q-Learning) model.