Autonomous Mapping and Navigation of Intelligent Vehicles
Project Duration: Sep. 2020 to Sep. 2023
Project Partners: Ecovacs University-Enterprise Joint Project
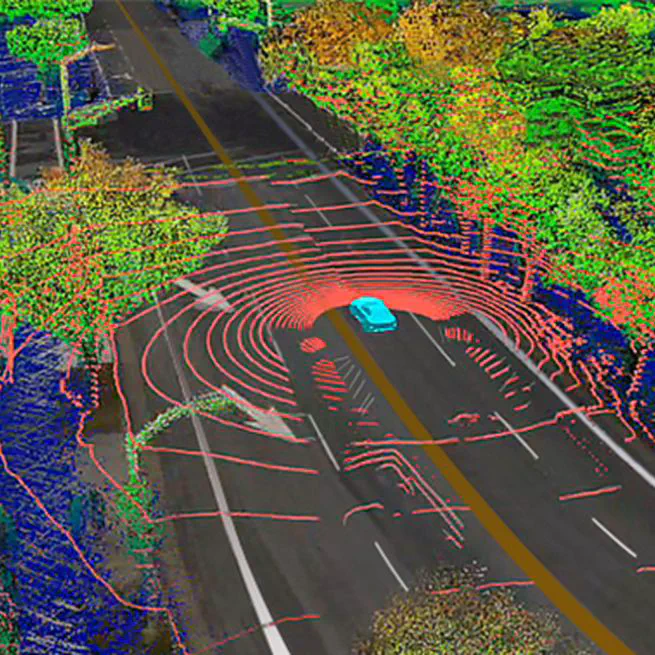
Project Details Utilizing convolutional neural networks for pedestrian detection and tracking in videos Predicting pedestrian trajectories to enable real-time obstacle avoidance for a small car Under the YOLOv4 environment, it allows for quick mapping Autonomous path planning under the ROS (Robot Operating System) framework Achievements Gather complex environmental information, complete autonomous mapping, plan the best path with the A* algorithm, and the system will also use OpenCV to preliminarily recognize pedestrian postures.
Sep 1, 2023